[Concept] - ML/DL Terms
Terms Arrangement
이미지를 기준으로 설명
현실의 이미지를 컴퓨터로 옮길 때 컴퓨터는 이미지를 데이터로 전환 후 저장한다.
각 픽셀마다 수치 값을 가지고 있다. 픽셀마다 8bit를 기준으로 하면 0~255의 범위의 값을 가지고 있다. \(2^8 = 256\)
1채널의 경우는 Grayscale로 흑백이미지라고 부른다. 1채널의 경우는 1개의 픽셀당 0~255 중 1개의 값을 가진다.
3채널(RGB..)는 우리가 흔히 접하는 경우고, 3개의 채널을 가지고 있어(R,G,B)를 각각의 3개의 값에 0~255의 중 1개의 값을 가져 (0,222,224) 같은 방식으로 값을 가지고 있다고 생각하시면 됩니다.
정리하면, 1채널 : 픽셀 1개당 0~255중 1개의 값 3채널 : 픽셀 1개당 0~255중 3개의 값 ex.(0,224,221)
CNN : Convolutional Neural Networks, 합성곱 신경망, 주로 Computer Vision(CV)분야에서 쓰임, 사람의 뇌와 눈을 통한 시각적인 결과를 인공신경망을 통해 나타냄
Convolutional : 합성곱
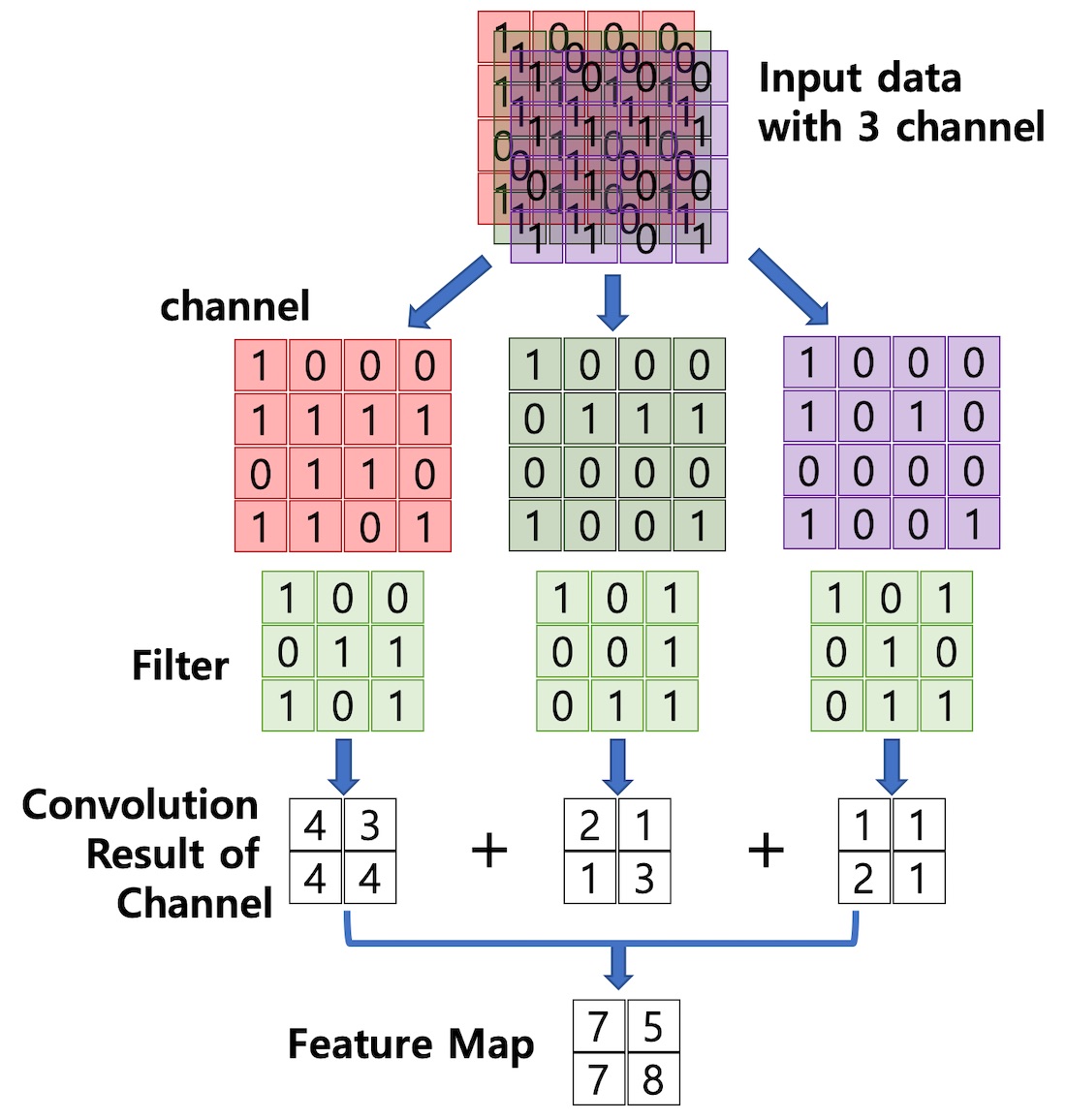
 필터가 이미지 위를 돌아다니면서 해당 픽셀값과 필터의 값을 곱해가면서 결과값(특징)을 추출함
필터가 이미지 위를 돌아다니면서 해당 픽셀값과 필터의 값을 곱해가면서 결과값(특징)을 추출함Channel : 채널
 이미지에서 이미지 크기의 한 색상을 나타내는 값들의 집합 CNN에서 1개의 커널(필터)에 의해서 1개의 채널이 만들어짐 이미지에서 채널 : 위에 의미와 동일 CNN에서 채널 : 커널의 개수와 동일
이미지에서 이미지 크기의 한 색상을 나타내는 값들의 집합 CNN에서 1개의 커널(필터)에 의해서 1개의 채널이 만들어짐 이미지에서 채널 : 위에 의미와 동일 CNN에서 채널 : 커널의 개수와 동일Filter : 필터
 커널이 weighted sum하는 영역의 크기 4x4x3이미지를 sliding windows를 하면서 커널이 돌아다니면 4x4이미지의 하나의 채널당 커널이 돌아다니게 되고 모든 채널의 값을 더할 시 4x4x3이 필터에 해당 필터의 크기 = weight의 개수
커널이 weighted sum하는 영역의 크기 4x4x3이미지를 sliding windows를 하면서 커널이 돌아다니면 4x4이미지의 하나의 채널당 커널이 돌아다니게 되고 모든 채널의 값을 더할 시 4x4x3이 필터에 해당 필터의 크기 = weight의 개수Kernel : 커널
이미지 위에서 돌아다니는 하나의 값의 집합 sliding windows하는 영역에서의 크기 이미지의 특징을 찾아내기 위한 공용 파라미터 크기가 크면 클수록 더 많은 Feature 정보를 가져올 수 있음 지정된 간격을 이동하면서 채널별로 합성곱을 구해 하나의 Feature map을 구성
보통 CNN에서, 필터와 커널은 혼용되어서 사용함 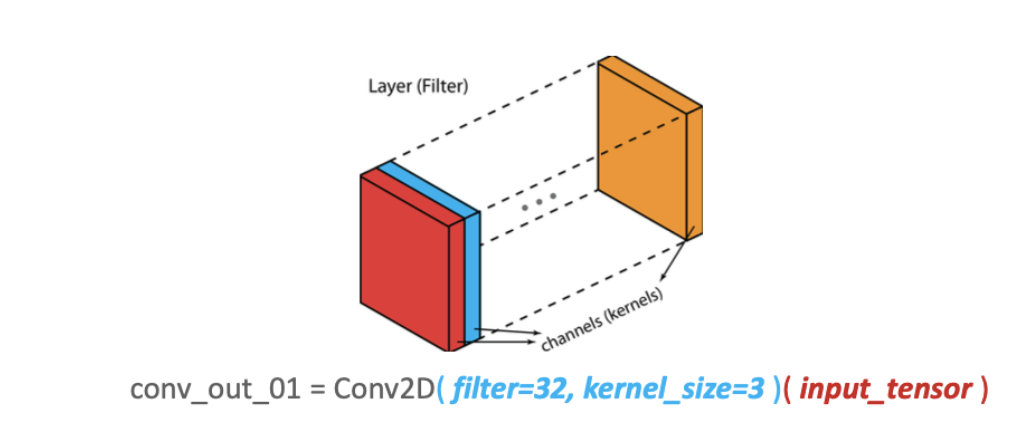
Stride : 스트라이드 커널이 이미지 위를 지나다닐 때의 간격
Padding : 패딩
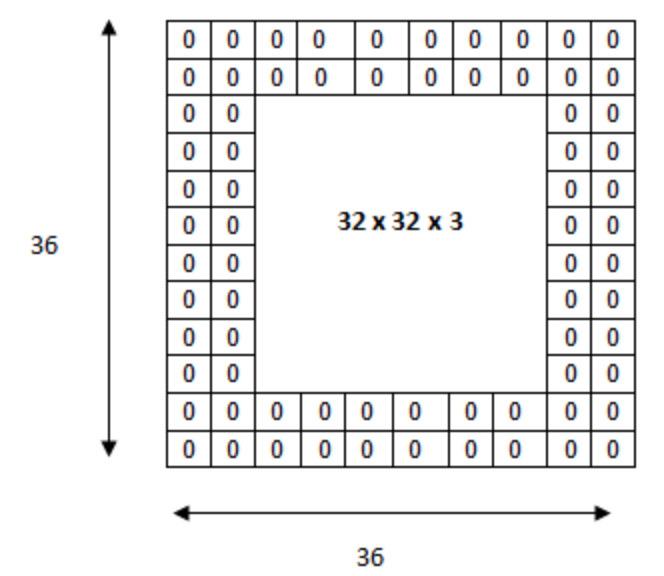 입력 데이터의 외곽에 지정된 픽셀만큼 특정 값으로 채워 넣어 출력 데이터가 줄어드는 것을 방지 사이즈 조절 기능 + 이미지의 외곽이라는 것을 신경망에게 인식
입력 데이터의 외곽에 지정된 픽셀만큼 특정 값으로 채워 넣어 출력 데이터가 줄어드는 것을 방지 사이즈 조절 기능 + 이미지의 외곽이라는 것을 신경망에게 인식Pooling : 풀링
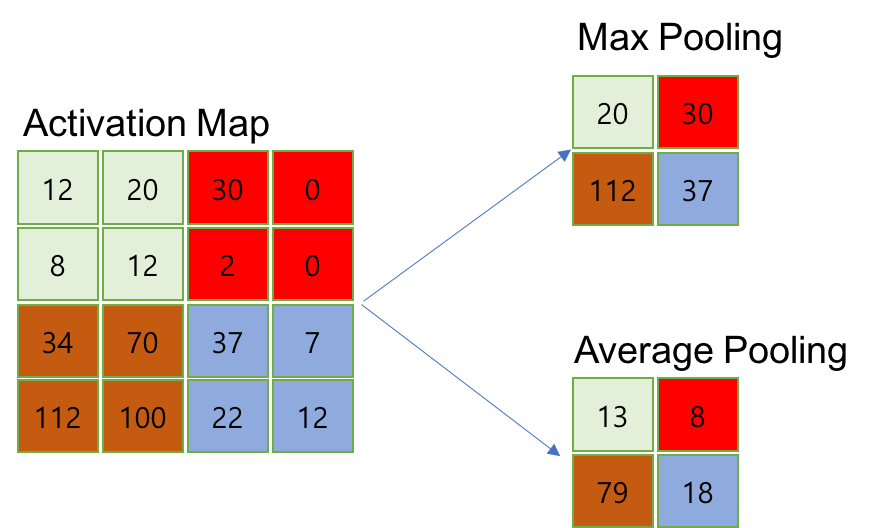 출력 데이터의 크기를 줄이거나 특정 데이터 강조 방식 : Max Pooling, Average Pooling
출력 데이터의 크기를 줄이거나 특정 데이터 강조 방식 : Max Pooling, Average Pooling- Max Pooling : 영역 안에서 최대 값을 추출
- Average Pooling : 영역 안에서 평균 값을 추출
학습 대상 파라미터 없음, 채널 수 변경 없음, 행렬 크기 감소